MSE LP Constrained Optimization of Fishing Effort
Carl J. Walters
Optimization methods like Ecosim’s policy optimization search procedure have been used to find by-fleet fishing efforts that maximize various multi criteria benefit functions for ecosystem management, with criteria ranging from total profits to total employment and maintenance of ecosystem structure. These optimization methods work by running an ecosystem model that includes fishing mortality rates for multiple biomass groups by the multiple fleets, for long enough simulation periods for production and trophic interaction effects to play out. Fishing efforts by fleet are varied across simulation runs so as to seek the effort combination that maximizes the long term benefit function. The result is a vector EOPTj, j=1,…,nf, of optimum long term efforts for the nf fleets included in the model.
Unfortunately, these optimum long term efforts typically cannot be used directly in management strategy evaluations, since they ignore constraints associated with fishery development (how fast efforts can grow or be reduced) and more importantly typically involve fishing efforts that would cause ecosystem simplification (overfishing of weaker stocks, even use of fleets to cull some species so as to increase productivity of others). In at least some jurisdictions like the United States, there is a strict legal mandate not to allow overharvesting (fishing rate exceeding Fmsy) for any species. Further, in modeling management decision making over time, it is often necessary to represent the use of 'control rules' that prescribe reduced fishing mortality rates for particular stocks when those stocks are below desired reference biomass levels.
A relatively simple linear programming method could theoretically be used to find long-term efforts that are constrained to be at or below the long term optima EOPTj, while respecting the relative fishery values represented in the long term optimization and also constraints associated with fishing mortality rate targets or upper limits by species. But more importantly, the same optimization procedure can also be used to set annual effort limits in MSE simulations, as an option to use effort input controls rather than the output (quota) controls assumed in the CEFAS MSE module. This chapter explains the basic linear programming formulation.
Suppose that the fleets harvest i=1,…,ns species (or biomass groups), with each unit of effort for fleet j causing a fishing mortality rate qij on species i (qij is the catchability coefficient for species i by fleet j, and is also the Ecopath base fishing mortality rate for i,j). Suppose that for each species i, there is a target or maximum allowable fishing mortality rate FTARGETi, summed over all fleets that cause fishing mortality (landings and/or discards) on i. Suppose that we assign an 'importance weight' vj to effort by fleet j, where vj reflects the relative value of increasing (or maintaining) effort for fleet j because of its contribution to overall long term ecosystem value and/or its legal entitlement to fish. Then the linear programming optimization can be formulated simply, as, maximize,
[latex]\sum \limits _{j=1}^{nf} v_j E_j \tag{1}\label{1}[/latex]
by varying the Ej subject to the constraints,
[latex]EMIN_j < E_j < EOPTj \qquad for \; j=1,...,nf\tag{2}\label{2}[/latex]
[latex]\sum \limits _{j=1}^{nf} q_{ij}E_j \leq FTARGET_i \qquad for \; j=1,...,nf \tag{3}\label{3}[/latex]
That is, try to make the efforts Ej as large as possible without exceeding EOPTj, while allowing efforts of at least EMINj and not allowing the sums of qijEj to exceed target fishing rate for any species i. An alternative formulation for recognizing fishery development rate constraints would be to replace the first set of nf constraints (2) with,
[latex]EMIN_j < E_j < EMAX_j \tag{4}\label{4}[/latex]
Where the EMIN and EMAX are allowed to vary from year to year by limited increments from the previous year’s values, and are not allowed to exceed EOPT.
Figure 1 illustrates the kind of complicated solutions that can arise from this optimization, even for a very simple case where two fishing fleets pursue just two species, with one fleet having higher catchability for one of the species and the other fleet having higher catchability for the other species.
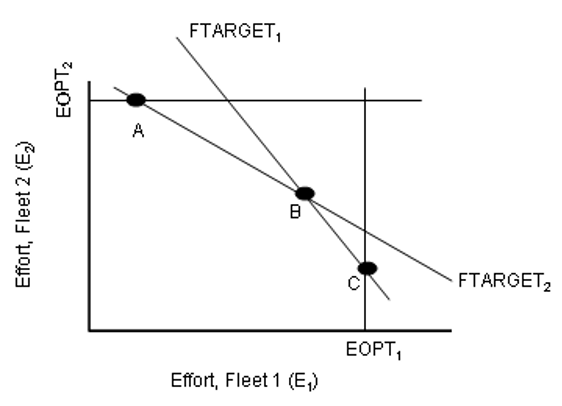
The lines in Figure 1 represent effort levels that exactly meet the constraints; efforts must be to the left and below each line in order to be feasible. Thus the feasible effort combinations are only those in the polygon from the graph origin out to the first constraint lines met. Since efforts are to be as large as possible, the solution has to lie along one of those first lines met, and in fact has to be on one of the three vertices marked A, B, C.
- Effort combination A represents Fleet 1 being severely restricted, but Fleet 2 operating at its EOPT.
- Effort combination C represents Fleet 2 being severely restricted but Fleet 1 operating at its EOPT, and
- Effort combination B represents a 'balanced' policy choice where both fleets are restricted to below EOPT in order to 'share the burden' of avoiding exceeding either of the two FTARGET species constraints.
Which of these three combinations will be chosen (solve the linear programming maximization) depends on the value weights vj in (1). If v1 is much higher than v2, combination C will be chosen, combination A will be chosen if v2 is larger, and setting the two v’s equal will more likely lead to the balanced combination B. Note also in Figure 1 that as the FTARGET constraints are 'relaxed' (increased so the sloped lines move upward and to the right), it becomes more likely that the optimum effort combination will lie near EOPT for both fleets; likewise, as these constraints are 'tightened' (reduced so the sloped lines move down and to the left), it becomes more likely that the EOPTs will not be in the feasible region so that the optimum solution will lie either with a mixed effort combination or with one or another of the fleets shut down entirely.
Using the linear programming formulation, it is simple to evaluate the cost, in terms of lost total value, of introducing more restrictive constraints on species harvest rates. In the overall management strategy evaluation setup for Ecosim, the only other way to evaluate this cost is to do policy runs with and without 'weakest stock' constraints on fleet quotas, where all fleets are assumed to share equally in reductions needed to meet such constraints. The linear programming solution may well demonstrate that such equal sharing of the conservation burden is in fact far from optimum.
The linear programming formulation can also be used to demonstrate potential increases in fishery value from selective fishing practices that change the species-specific catchabilities qij. For example, if q12 and q21 (catchability of species 1 by fleet 2 and of species 2 by fleet 1) could be greatly reduced in the Figure 1 example, the slopes of the two FTARGET constraint lines would decrease/increase so as to move the solution toward higher total efforts (move point B up and to the right, closer to the EOPT1-EOPT2 intersection) and thus higher total value.
The key to getting useful results from the linear programming exercise is to make wise choice of the fleet value weights vj. One objective option for doing this each year (assuming a management strategy where biomass and perhaps catchability qij estimates are being updated regularly) is to set each weight to be
[latex]v_j = \sum \limits _{i=1}^{nf}P_{ij}q_{ij}B_i \tag{5} \label{5}[/latex]
where Pij is the landed price for species i by fleet j and Bi is the current estimated biomass of species i. Using this formula, vj is just the sum over species of predicted catches per effort times prices, so that vjBj represents the (short term) predicted total value of landings by fleet j and the overall linear programming objective function just becomes the predicted total landed value of all catches.
An option in the management strategy evaluation interface allows users to replace the complicated CEFAS rules for setting quotas for each simulation year to limit mortality rates to acceptable levels, to instead use annual LP optimization each year during each MSE simulation run so as to limit fishing efforts rather than quotas. The basic idea is to replace the single EOPTj values in the equations above with time-varying values calculated for each year and group, and to use an annual value for the FTARGETi target fishing rate for each group i for that year, calculated from the estimated biomass of the group and the group's harvest control rule that specifies how target fishing rate for the group should vary with stock size. This option can lead to complex policy changes over time when the FTARGETi decrease with decreases in biomasses Bi.
