Chapter 8 Statics and Torque
8.2 The Second Condition for Equilibrium
Summary
- State the second condition that is necessary to achieve equilibrium.
- Explain torque and the factors on which it depends.
- Describe the role of torque in rotational mechanics
TORQUE
The second condition necessary to achieve equilibrium involves avoiding accelerated rotation (maintaining a constant angular velocity. A rotating body or system can be in equilibrium if its rate of rotation is constant and remains unchanged by the forces acting on it. To understand what factors affect rotation, let us think about what happens when you open an ordinary door by rotating it on its hinges.
Several familiar factors determine how effective you are in opening the door. See Figure 1. First of all, the larger the force, the more effective it is in opening the door—obviously, the harder you push, the more rapidly the door opens. Also, the point at which you push is crucial. If you apply your force too close to the hinges, the door will open slowly, if at all. Most people have been embarrassed by making this mistake and bumping up against a door when it did not open as quickly as expected. Finally, the direction in which you push is also important. The most effective direction is perpendicular to the door—we push in this direction almost instinctively.
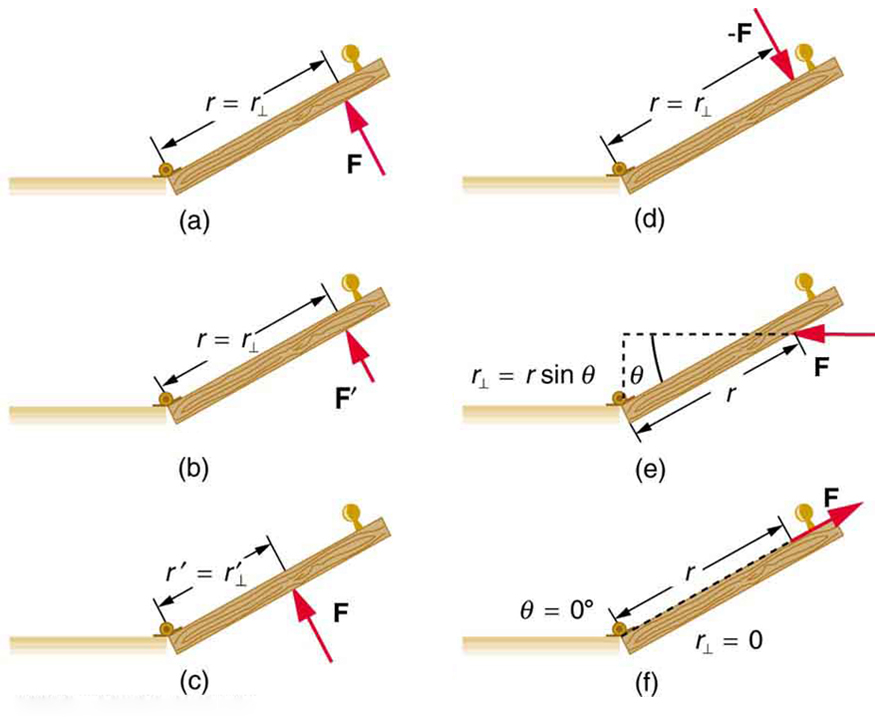
The magnitude, direction, and point of application of the force are incorporated into the definition of the physical quantity called torque. Torque is the rotational equivalent of a force. It is a measure of the effectiveness of a force in changing or accelerating a rotation (changing the angular velocity over a period of time). In equation form, the magnitude of torque is defined to be
where τ (the Greek letter tau) is the symbol for torque, r is the distance from the pivot point to the point where the force is applied, F is the magnitude of the force, and θ is the angle between the force and the vector directed from the point of application to the pivot point, as seen in Figure 1 and Figure 2. An alternative expression for torque is given in terms of the perpendicular lever arm r⊥ as shown in Figure 1 and Figure 2, which is defined as
so that
The perpendicular lever arm r⊥ is the shortest distance from the pivot point to the line along which [latex]\vec{\text{F}}[/latex] acts; it is shown as a dashed line in Figure 1 and Figure 2. This line is know was the line of action of the force. Note that the line segment that defines the distance r⊥ is perpendicular to [latex]\vec{\text{F}}[/latex], as its name implies. It is sometimes easier to find or visualize r⊥ than to find both r and θ. In such cases, it may be more convenient to use τ = r⊥F rather than τ = rF sin θ for torque, but both are equally valid.
The SI unit of torque is newtons times meters, usually written as N⋅m. For example, if you push perpendicular to the door with a force of 40 N at a distance of 0.800 m from the hinges, you exert a torque of 32 N⋅m (0.800 m × 40 N × sin 90°) relative to the hinges. If you reduce the force to 20 N, the torque is reduced to 16 N⋅m, and so on.
The torque is always calculated with reference to some chosen pivot point. For the same applied force, a different choice for the location of the pivot will give you a different value for the torque, since both r and θ depend on the location of the pivot. Any point in any object can be chosen to calculate the torque about that point. The object may not actually pivot about the chosen “pivot point.”
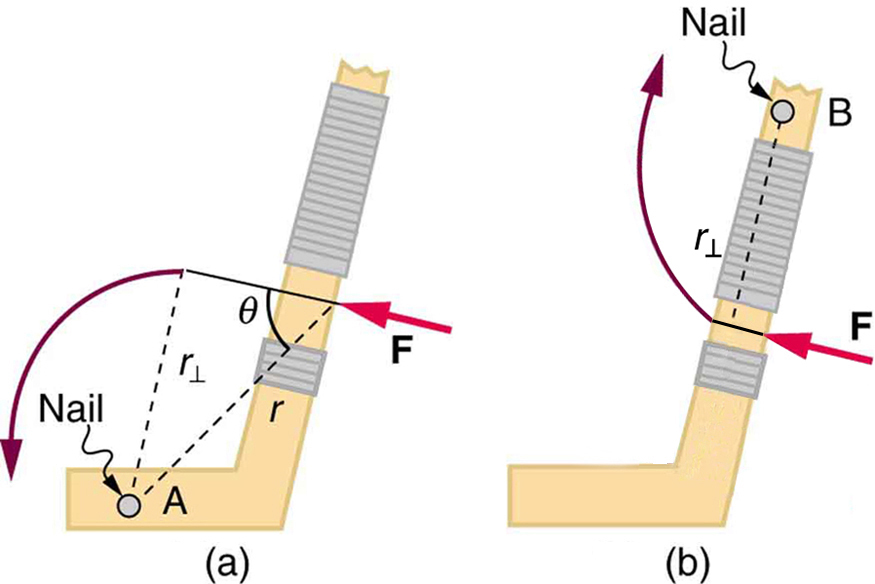
For rotation in a plane, torque has two possible directions. Torque is either clockwise or counterclockwise relative to the chosen pivot point, as illustrated for points B and A, respectively, in Figure 2. If the object can rotate about point A, it will rotate counterclockwise, which means that the torque for the force is shown as counterclockwise relative to A. But if the object can rotate about point B, it will rotate clockwise, which means the torque for the force shown is clockwise relative to B. Also, the magnitude of the torque is greater when the lever arm is longer.
Now, the second condition necessary to achieve equilibrium is that the net external torque on a system must be zero. An external torque is one that is created by an external force. You can choose the point around which the torque is calculated. The point can be the physical pivot point of a system or any other point in space—but it must be the same point for all torques. If the second condition (net external torque on a system is zero) is satisfied for one choice of pivot point, it will also hold true for any other choice of pivot point in or out of the system of interest. (This is true only in an inertial frame of reference.) The second condition necessary to achieve equilibrium is stated in equation form as
where net means total. Torques, which are in opposite directions are assigned opposite signs. A common convention is to call counterclockwise (ccw) torques positive and clockwise (cw) torques negative.
Center of Mass and Center of Gravity
In the previous chapter on Force and Newton's Laws, we made the assumption that all objects were point masses. Clearly, that assumption is no longer valid in problems involving torques and extended objects (i.e., objects that are not considered point masses). As we have seen above, applying a force typically results in a torque. However, if a force is applied to the center of mass of an object (or the line of action of the force runs through the center of mass), the force will only result in linear motion (i.e., the force will not result in any torque). For objects with a uniform mass density, the center of mass is the geometric center of the object. The center of mass is a hypothetical point where it can be assumed all the mass of the object is concentrated to help visualize the linear motion of the object.
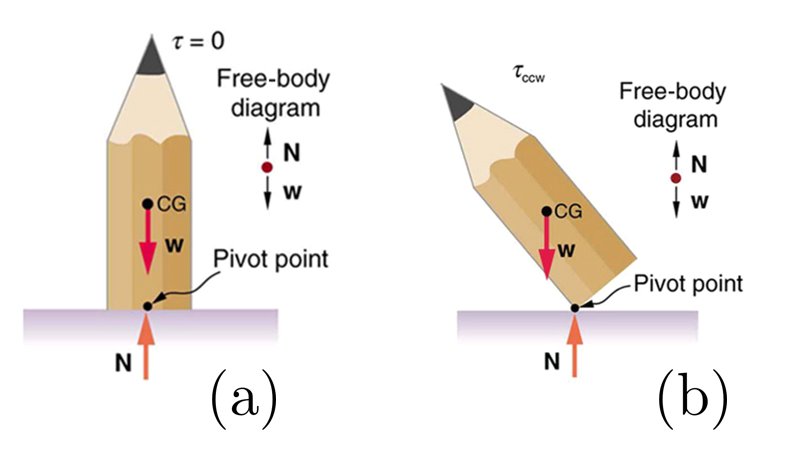
A closely related concept is the center of gravity of an object, which is the point where it is assumed that the gravitational force acts on the object. For objects where the acceleration due to gravity does not change over the size of the object, the center of gravity is located at the same point as the center of mass (this will be true for all problems you encounter in this book). Depending on the location of the center of gravity in relation to the pivot point, it is possible for the gravitational force to exert a torque. For example, in Figure 3a the center of gravity of the pencil is directly above the pivot point, so it does not exert a force. On the other hand, in Figure 3b the gravitational force exerts a counter clockwise torque. However, in both cases the net force on the pencil is zero.
Example 1: She Saw Torques On A Seesaw
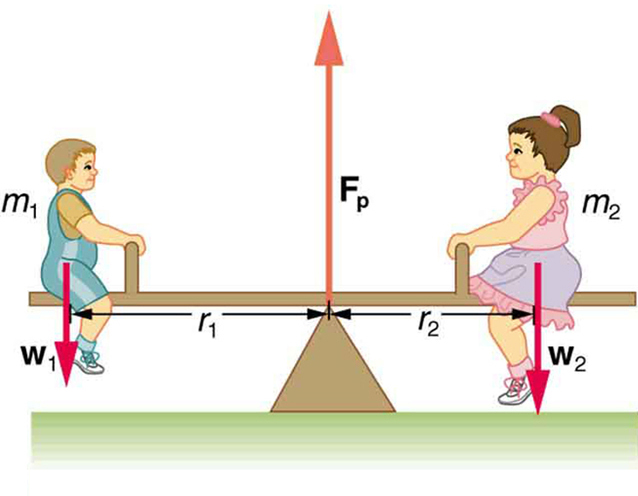
When two children balance a seesaw as shown in Figure 4, they satisfy the two conditions for equilibrium. Most people have perfect intuition about seesaws, knowing that the lighter child must sit farther from the pivot and that a heavier child can keep a lighter one off the ground indefinitely. The two children shown in Figure 4 are balanced on a seesaw of negligible mass. (This assumption is made to keep the example simple—more involved examples will follow.) The first child has a mass of 26.0 kg and sits 1.60 m from the pivot.(a) If the second child has a mass of 32.0 kg, how far is she from the pivot? (b) What is Fp, the supporting force exerted by the pivot?
Strategy
Both conditions for equilibrium must be satisfied. In part (a), we are asked for a distance; thus, the second condition (regarding torques) must be used, since the first (regarding only forces) has no distances in it. To apply the second condition for equilibrium, we first identify the system of interest to be the seesaw plus the two children. We take the supporting pivot to be the point about which the torques are calculated. We then identify all external forces acting on the system.
Solution (a)
The three external forces acting on the system are the weights of the two children and the supporting force of the pivot. Let us examine the torque produced by each. Torque is defined to be
Here θ = 90°, so that sin θ = 1 for all three forces. That means r⊥ = r for all three. The torques exerted by the three forces are first,
second,
and third,
Note that a minus sign has been inserted into the second equation because this torque is clockwise and is therefore negative by convention. Since Fp acts directly on the pivot point, the distance rp is zero. A force acting on the pivot cannot cause a rotation, just as pushing directly on the hinges of a door will not cause it to rotate. Now, the second condition for equilibrium is that the sum of the torques on both children is zero. Therefore
or
Weight is mass times the acceleration due to gravity. Entering mg for w, we get
Solve this for the unknown r2:
The quantities on the right side of the equation are known; thus, r2 is
As expected, the heavier child must sit closer to the pivot (1.30 m versus 1.60 m) to balance the seesaw.
Solution (b)
This part asks for a force Fp. The easiest way to find it is to use the first condition for equilibrium, which is
The forces are all vertical, so that we are dealing with a one-dimensional problem along the vertical axis; hence, the condition can be written as
where we again call the vertical axis the y-axis. Choosing upward to be the positive direction, and using plus and minus signs to indicate the directions of the forces, we see that
This equation yields what might have been guessed at the beginning:
So, the pivot supplies a supporting force equal to the total weight of the system:
Entering known values gives
Discussion
The two results make intuitive sense. The heavier child sits closer to the pivot. The pivot supports the weight of the two children. Part (b) can also be solved using the second condition for equilibrium, since both distances are known, but only if the pivot point is chosen to be somewhere other than the location of the seesaw’s actual pivot!
Several aspects of the preceding example have broad implications. First, the choice of the pivot as the point around which torques are calculated simplified the problem. Since Fp is exerted on the pivot point, its lever arm is zero. Hence, the torque exerted by the supporting force Fp is zero relative to that pivot point. The second condition for equilibrium holds for any choice of pivot point, and so we choose the pivot point to simplify the solution of the problem.
Second, the acceleration due to gravity canceled in this problem, and we were left with a ratio of masses. This will not always be the case. Always enter the correct forces—do not jump ahead to enter some ratio of masses.
Third, the weight of each child is distributed over an area of the seesaw, yet we treated the weights as if each force were exerted at a single point. This is not an approximation—the distances r1 and r2 are the distances to points directly below the center of gravity of each child. As we shall see in the next section, the mass and weight of a system can act as if they are located at a single point.
Finally, note that the concept of torque has an importance beyond static equilibrium. Torque plays the same role in rotational motion that force plays in linear motion. We will examine this in the next chapter.
TAKE-HOME EXPERIMENT
Take a piece of modeling clay and put it on a table, then mash a cylinder down into it so that a ruler can balance on the round side of the cylinder while everything remains still. Put a penny 8 cm away from the pivot. Where would you need to put two pennies to balance? Three pennies?
Section Summary
- The second condition assures those torques are also balanced. Torque is the rotational equivalent of a force in producing a rotation and is defined to be
[latex]\tau=rF \sin \theta[/latex]
where τ is torque, r is the distance from the pivot point to the point where the force is applied, F is the magnitude of the force, and θ is the angle between F and the vector directed from the point where the force acts to the pivot point. The perpendicular lever arm r⊥ is defined to be
[latex]r_{\perp}=r \sin \theta[/latex]so that
[latex]\tau=r_{\perp}F.[/latex] - The perpendicular lever arm r⊥ is the shortest distance from the pivot point to the line along which F acts. The SI unit for torque is newton-meter (N⋅m). The second condition necessary to achieve equilibrium is that the net external torque on a system must be zero:
[latex]\text{net}~\tau=0[/latex]
By convention, counterclockwise torques are positive, and clockwise torques are negative.
Glossary
- torque
- turning or twisting effectiveness of a force
- perpendicular lever arm
- the shortest distance from the pivot point to the line along which FF lies
- SI units of torque
- newton times meters, usually written as N·m
center of mass
a hypothetical point where it can be assumed all the mass of the object is concentrated to help visualize the linear motion of the object.
- center of gravity
- the point where the total weight of the body is assumed to be concentrated, which is the point where the force of gravity acts
Conceptual Questions
1: What three factors affect the torque created by a force relative to a specific pivot point?
2: A wrecking ball is being used to knock down a building. One tall unsupported concrete wall remains standing. If the wrecking ball hits the wall near the top, is the wall more likely to fall over by rotating at its base or by falling straight down? Explain your answer. How is it most likely to fall if it is struck with the same force at its base? Note that this depends on how firmly the wall is attached at its base.
3: Mechanics sometimes put a length of pipe over the handle of a wrench when trying to remove a very tight bolt. How does this help? (It is also hazardous since it can break the bolt.)
Problems & Exercises
1: (a) When opening a door, you push on it perpendicularly with a force of 55.0 N at a distance of 0.850m from the hinges. What torque are you exerting relative to the hinges? (b) Does it matter if you push at the same height as the hinges?
2: When tightening a bolt, you push perpendicularly on a wrench with a force of 165 N at a distance of 0.140 m from the centre of the bolt. (a) How much torque are you exerting in newton × meters (relative to the centre of the bolt)? (b) Convert this torque to foot-pounds.
3: Two children push on opposite sides of a door during play. Both push horizontally and perpendicular to the door. One child pushes with a force of 17.5 N at a distance of 0.600 m from the hinges, and the second child pushes at a distance of 0.450 m. What force must the second child exert to keep the door from moving? Assume friction is negligible.
4: Use the second condition for equilibrium (net τ = 0) to calculate Fp in Example 1, employing any data given or solved for in part (a) of the example.
5: Repeat the seesaw problem in Example 1 with the centre of mass of the seesaw 0.160 m to the left of the pivot (on the side of the lighter child) and assuming a mass of 12.0 kg for the seesaw. The other data given in the example remain unchanged. Explicitly show how you follow the steps in the Problem-Solving Strategy for static equilibrium.
Solutions
Problems & Exercises
1: (a) 46.8 N⋅m (b) It does not matter at what height you push. The torque depends on only the magnitude of the force applied and the perpendicular distance of the force’s application from the hinges. (Children don’t have a tougher time opening a door because they push lower than adults, they have a tougher time because they don’t push far enough from the hinges.)
3: 23.3 N
5: Given:
a) Since children are balancing:
So, solving for r2 gives: r2 = ( (26.0 kg)(9.80 m/s2)(1.60 m) + (12.0 kg)(9.80 m/s2)(0.160 m) ) / ( (32.0 kg) (9.80 m/s2) ) = 1.36 m
b) Since the children are not moving:
So that Fp = (26.0 kg + 32.0 kg +12.0 kg)(9.80 m/s2) = 686 N
