Vectors
Polar vs. Rectangular Form
Polar form
When dealing with vectors, there are two ways of expressing them. Up to this point, we have used a magnitude and a direction such as 30 V @ 67°. This is what is known as the polar form. It is more often the form that we like to express vectors in.
Rectangular form
Rectangular form breaks a vector down into X and Y coordinates. In the example below, we have a vector that, when expressed as polar, is 50 V @ 55 degrees. The first step to finding this expression is using the 50 V as the hypotenuse and the direction as the angle. Next, we draw a line straight down from the arrowhead to the X axis. What does this look like to you? If you said right triangle, give yourself a pat on the back. We then can use the angle and the hypotenuse to determine the X axis with these equations:
- cos 55°×50 = 28.7 for the X axis
- sin 55°×50 = 41 for the Y axis
This is accomplished just by transposing the ratios from what we learned previously in trigonometry.
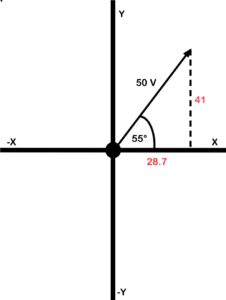
We then can express the same vector as 28.7, j 41.
Where did that j come from?
The letter j is put in front of the y component to indicate the difference between the X and the Y. The reason j is used is this.
As a way of telling the difference between X and Y, it was decided that a letter should be put in front of the Y. The X and Y components don’t really exist, and are referred to as imaginary numbers. Because each is an imaginary number, the letter i was suggested. However, the letter i is also used as a symbol for current, so it was decided to go with the letter j instead.
Why polarity is important
Let’s look at another example. The polar form is 60 V @ 140 degrees. This puts the vector in the second quadrant.
In the second quadrant, X is – (negative) and Y is + (positive). The angle of 140 degrees is used from the 0-degree point. To use trigonometry, we need to determine what the angle is in reference to the X axis. In this example, it is 40 degrees (the supplement of 140 degrees). After that, we can use trigonometry to determine the X and Y components.
- cos 40°×60 = 46 for the X axis
- sin 40°×60 = 39 for the Y axis
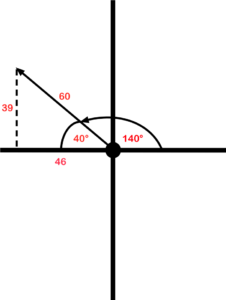
If we are going to express it in rectangular form, use -46, j39. Remember that the X component is negative and the Y component is positive as they are in the second quadrant.
Video!
This video walks through how to convert from polar form to rectangular form.
Rectangular to polar
Up to this point, we have been converting the polar form to rectangular. It is possible–and even important–to convert from rectangular to the polar form. If you have been given the rectangular coordinates, the best thing you can do is chart them out.
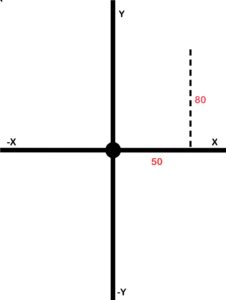
For instance, if you are given the coordinates 50, j80, then:
Step 1. Draw them out on an X-Y chart.
Step 2. Draw in the resultant and use Pythagoras’ theorem to determine its size.
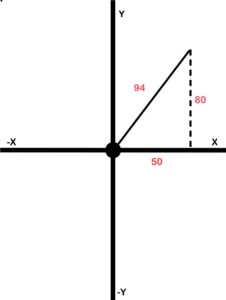
Step 3. Use trigonometry to determine the angle.
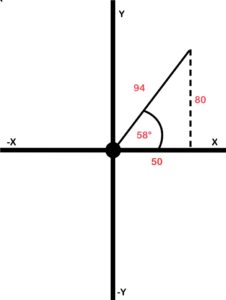
Step 4. Using the resultant and the angle, go ahead and express it in polar form: 94 @ 58°
Congrats, you did it!
Video!
This video walks through how to convert from rectangular form to polar form.
Heed the quadrant!
There is one thing you need to watch. You need to be aware of what quadrant you are in. This is especially important when dealing with the direction (angle). When we work out the angle using the Pythagoras’ theorem, we use the angle in relation to the X axis but not the direction of the vector. Confused? Look at the example below where the coordinates -36, j29 are given.
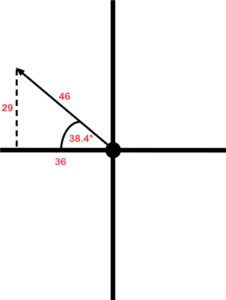
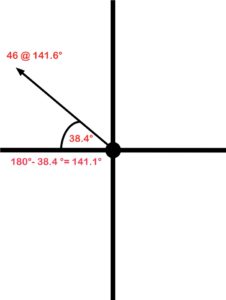
Using Pythagoras and trigonometry, we worked out that the resultant was 46 and the angle, in reference to the X axis, was 38.4 degrees. However, the polar form would not be 46 @ 38.4 degrees. We have to take into account that it is in the second quadrant. That means the direction must be somewhere between 90 and 180 degrees. In order to work out the actual direction in this example, we take 180 degrees and subtract 38.4 degrees from it to get 141.6 degrees.
In the third quadrant, we calculate the angle in reference to the X axis and add 180 degrees to it. In the fourth quadrant, we calculate the angle and subtract it from 360 degrees.
Something cool about the fourth quadrant
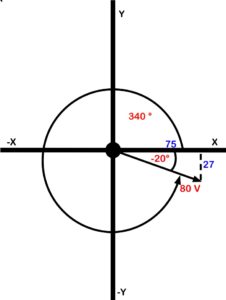
When we are dealing with the fourth quadrant, there are two ways we can express the direction. We can work out the angle relative to the X axis and subtract it from 360 degrees as previously stated. Or, another way to express it is to work out the angle and then throw a negative sign in front of it. Mathematically it is the same thing. In this example, it can be expressed as 80 V @ 340° or 80 V @ −20°.
Didn’t someone mention something about adding vectors?
Attributions
Converting Polar to Rectangular. video by The Electric Academy is under a Creative Commons Attribution Licence.
Converting Rectangular to Polar form. video by The Electric Academy is under a Creative Commons Attribution Licence.
