41 Fleet effort dynamics
Ecosim and Ecospace can include fishing pressure in two ways: using fishing mortality or fishing effort. If fishing mortality is used, the corresponding catch is calculated for each time step from catch = fishing mortality · biomass. If effort is used, the key assumption is that the fishing mortality in the Ecopath baseline model corresponds to an effort of 1 (unity). Any change in effort over time will result in a proportional change in fishing mortality.
So, if in the Ecopath baseline, catch = 0.2 t km-2 year-1 and biomass for the group in question is 1 t km-2, the fishing mortality is calculated from the catch/biomass ratio to 0.2 year-1. If fishing effort increases, e.g., to 1.1 then this results in an F of 0.2 · 1.1 = 0.22 year-1. This is not an EwE invention, it follows straight from how fishing effort was originally defined.[1]
Effort is associated with fleets, and many fleets catch more than one species. That's fine, the F's will show the same proportional change for all species. But what if both effort for a fleet impacts a species for which there also a fishing mortality entered? In that case we have no choice but to let the fishing mortality overrule the effort for such a species. This indeed offers some flexibility, for instance in an application with a multi species fleet where there's detailed information from assessment for one species. We can then use the fishing mortality from the assessment for that species, and fleet effort for the rest.
There are three ways to specify temporal changes in fishing fleet sizes and fishing effort:
- By sketching temporal patterns of effort in the model run interface;
- By entering annual patterns via reference CSV files along with historical ecological response data; and
- By treating dynamics of fleet sizes and resulting fishing effort as unregulated and subject to fisher investment and operating decisions (“bionomic” dynamics, fishers as dynamic predators).
To facilitate exploration of alternative harvest regulation policies, the Ecosim default options are (1) or (2). However, you can invoke the fleet/effort dynamics model where effort is estimated, rather than input, by checking Ecosim > Input > Ecosim parameters > Fleet effort dynamics. Input parameters must then be set on the Ecosim > Input > Fleet size dynamics form.
When the fleet/effort response option is invoked, Ecosim starts each by erasing all previously entered time patterns for fishing efforts and fishing rates, and replaces these with simulated values generated as each simulation proceeds. The fleet/effort dynamics simulation model uses the idea that there are two time scales of fisher response:
- A short time response of fishing effort to potential income from fishing, within the constraints imposed by current fleet size, and
- A longer time investment/depreciation "population dynamics" for capital capacity to fish (fleet size, vessel characteristics).
These response scales are represented in Ecosim by two "state variables" for each gear type g.
Fast time response model
Eg,t is the current amount of effort (active, searching gear, scaled to 1.0 at the Ecopath base fishing mortality rates), and Kg,t is the maximum possible effort (Eg,t < Kg,t).
At each time step, a mean income per effort index Ig,t is calculated as
[latex]I_{g,t}=\sum_i q_{g,i} B_i P_{g,i} \tag{1}[/latex]
where i = ecological species or biomass group, qg,i is the catchability coefficient (possibly dependent on Bi) for species i by gear g, and Pg,i is the market price obtained per biomass of i by gear g fishers. Also, mean fleet profit rates PRg,t for fishing are calculated thus:
[latex]PR_{g,t}=I_{g,t}-c_g \tag{2}[/latex]
where cg is the cost of a unit of fishing effort for gear g (cost and price factors are entered via the Definition of fleets and Market price forms). For each time step, the "fast" effort response for the next (monthly) time step is predicted by a sigmoid function of income per effort and current fleet capacity:
[latex]E_{g,t+1}=\frac{K_{g,t}I^p_{g,t}}{I^p_{hg}+I^p_{g,t}} \tag{3}[/latex]
Here, Ihg and p are fleet-specific response parameters. Ihg is the income level needed for half maximum effort to be deployed and p is a "heterogeneity" parameter for fishers: high p values imply all fishers "see" income opportunity similarly (start or quit at similar income values), while low p values imply fishers "turn on" their effort over a wide range of mean incomes (start or quit over a wide range of average incomes), as shown in Figure 1.
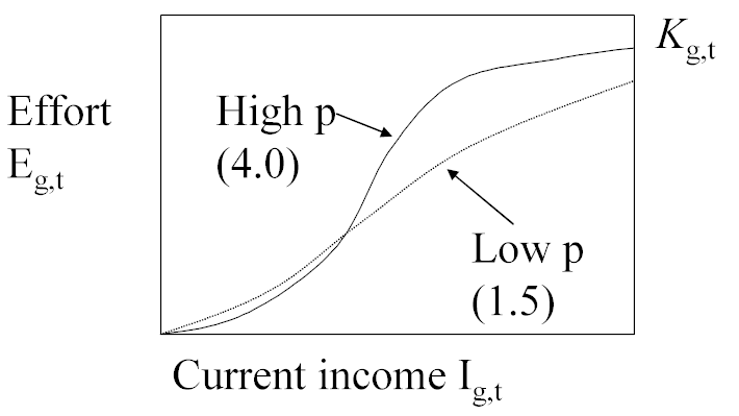
Figure 1. Effect of the "heterogeneity" parameter, p, on effort/income function.
Slow time response model
For each fleet, slow effort responses are modelled as changes in fleet capacity (Kg,t), which is a function of the capital depreciation rate ρg, the capital growth rate rg,t and profit PRg,t. The capital growth rate is calculated via a growth factor gfg,t, i.e.,
[latex]gf_{g,t+1}=\frac{K_{g,t}(r_{g,t}+\rho_g)}{PR_{g,t}} \tag{4}[/latex]
where Kg,1, ρg and rg,1 are set by the user. The annual capacity Kg,t is then updated as
[latex]K_{g,t+1}=K_{g,t}(1-\rho_g)+gf_{g,t}PR_{g,t+1} \tag{5}[/latex]
- Beverton, R.J.H. and Holt, S.J. 1957. On the dynamics of exploited fish populations. Fisheries Investigations, 19, 1-533. Chapman and Hall, Facsimile reprint 1993, London. 533 pp. ↵
